Project C3 – Optic Flow Decoding - Circuit Analysis in the Fly and Implementation on a Robofly.
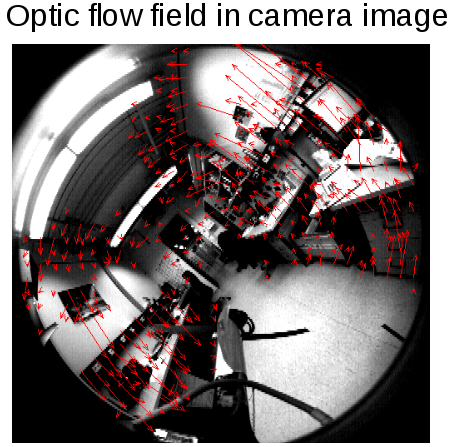
In the blowfly, motion vectors are computed from local retinal
brightness changes as predicted by the Reichardt-model of motion
detection; these vectors are integrated in the lobula plate by 60
tangential cells, which interact to form large receptive fields
[1-3]. Experiments on neck motor neurons reveal multimodal
integration of optic flow and wind information not seen in
 the lobula plate (Haag & Borst, unpubl.?????). In robotics,
using Reichardt motion d etectors for visual robot control [4] has been the exception rather
than the rule. We have implem ented high-speed detector arrays [5] for this purpose and found
that Reichardt-integrated robot control [6] is robust to feedback
delay. To date, neuronally inspired models of sensori-motor chains have not been realized in robotics.
the lobula plate (Haag & Borst, unpubl.?????). In robotics,
using Reichardt motion d etectors for visual robot control [4] has been the exception rather
than the rule. We have implem ented high-speed detector arrays [5] for this purpose and found
that Reichardt-integrated robot control [6] is robust to feedback
delay. To date, neuronally inspired models of sensori-motor chains have not been realized in robotics.
 Objectives and description of the project
Objectives and description of the project
We plan to study the complete set of motor neurons of the neck muscles of the fly, which are direct postsynaptic targets of the tangential cells, in the context of the multimodal integration of vision and inertial sensing. Cells will be described anatomically, receptive fields measured in extracellular recordings, and the precise connectivity between motor neurons and tangential cells mapped using dual recordings. By combining visual motion and inertial forcing, we will study multimodal integration. These findings will be exploited for the course control of a flying robot by incrementally implementing the models obtained for the motion detectors, lobula-plate circuitry and connectivity onto descending neurons onto a field programmable gate array (FPGA) chip. This chip will provide autonomous course control for a flying robot, which will be stabilized using methods of non-linear control theory. The goal is to achieve multimodal integration with an inertial measurement unit based on biological principles and stochastic, asymptotical observations.
[1]: Elyada et al. Nature Neurosci 2009. [2]: Wertz et al. J Neurosci 2008. [3]: Weber et al. New J Phys 2008. [4]: Han et al. IEEE Int Conf Robotics & Automation (ICRA) 2009. [5]: Wu et al. Proc IEEE Int Conf Rob Aut (ICRA) 2009. [6]: Zhang et al. Proc IEEE Int Conf Rob Aut (ICRA) 2008.
